Smart WHeelchair Project
- Granted a full home scholarship to develop novel control interfaces for sharing control between a wheelchair user and a smart wheelchair.
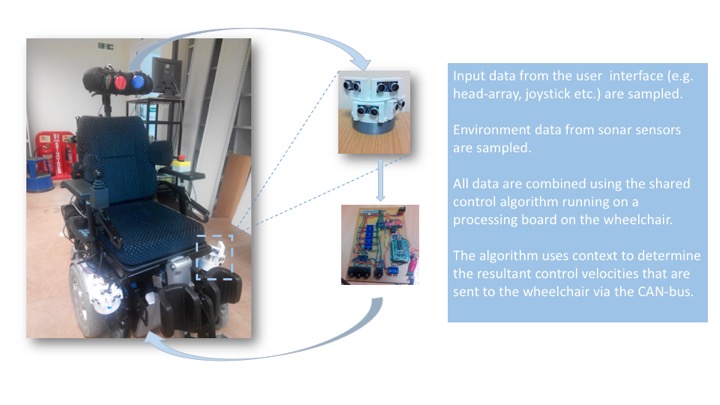
- Developed and tested a smart wheelchair prototype using ROS and Gazebo in a modular standardised distributed architecture as a proof of concept towards a large European collaboration on smart wheelchair production (ADAPT project).
- Collaborated with international research teams which included they port their sensors, interfaces, onto my modular system.
- Developed and implemented navigation algorithms for the wheelchair.
- Developed drivers for encoders, sonar and IR sensors.
- Built circuitry to interface all electronic hardware and control interfaces with wheelchair.
- Developed a low-cost visual tracking toolkit to aid in motion research using OpenCV, ARToolKitPlus, C++ and Python.
- Obtained NHS approval for clinical trial of smart wheelchair on patients with disabilities.
- Tested prototype on about 70 participants (able-bodied and people with disabilities) performing a total of about 210 driving tests both in real and simulated environments.
- Self written and developed software powering the smart wheelchair is estimated at around 20,000 lines of code.
Publications
- Ezeh C, Trautman P, Holloway C, Carlson T. Comparing shared control approaches for alternative interfaces: a wheelchair simulator experiment, IEEE International Conference on Systems, Man, and Cybernetics (SMC2017). IEEE
- Ezeh C, Trautman P, Devinge L, Bureau V, Babel M, Carlson T. Probabilistic vs linear blending shared control for wheelchair driving. In IEEE International Conference on Rehabilitation Robotics, 2017. IEEE
- Ezeh C, Holloway C, Carlson T. MoRe-T2 (Mobility Research Trajectory Tracker): Validation and Application Journal of Rehabilitation and Assistive Technologies Engineering 24 Dec 2016 (Journal article)
- C. Ezeh, T. Carlson, and C. Holloway, “MoRe-T2: An easy-to-use, low cost tracking system for mobility research,” in TRANSED 2015 Proceedings of The 14th International Conference on Mobility and Transport for Elderly and Disabled Persons, p. 2015, TRANSED, 2015.
UnDergraduate Projects
Project List
- Design and Implementation of Control and Path Planning of Autonomous Vehicle
- Design and Implementation of Control and Path Planning of Autonomous Vehicle
- Indoor State Estimation of QuadCopter
- Optimisation
- Predictive Control
- Others
MORE DETAILS
Design and Implementation of Control and Path Planning of Autonomous Vehicle (Grade: A)
- Researched and designed an integrated planning and execution navigation system where at every stage the system is guided by a global path.
- Investigated and simulated the integration of Model Predictive Control Regime to Path Planning.
- Formulated and simulated a feasible trajectory that can be produced by the path planner and followed using MPC.
- Designed a physical robot car that moves using focussed D-star algorithm in an off-board planner to compute optimal path in the presence obstacle in a dynamic environment.
- Developed software using C++, Python and ROS.
- Physical demo is given here.
Indoor State Estimation of QuadCopter (Grade: A)
- Position and attitude tracking (6DOF) of Quadcopter using Kalman filter algorithm and feature extraction using Xtion Pro Depth Camera on an on-board processor, Samsung’s Arndale board.
- Responsible for deriving algorithm and programming C++ code for Kalman filter in embedded environment.
Optimisation (Grade: N/A)
- Implemented the optimisation algorithms: Steepest gradient, Newton method , Quasi-Newton (BFGS), Conjugate direction method and simplex method all with Armijo line search condition.
Predictive Control (Grade: A)
- Coded in matlab the receding horizon regime for set point tracking by the linearised dynamics of a Cessna Citation 500 aircraft.
- Analysed the system stability in the presence of input and output constraints.
Other Projects
- Real-time Embedded System (Grade: B)
- High-Performance Computing (Grade: N/A)
- Modelling and Control of Mechanical Systems (Grade: A*)
- Systems Identification (Grade: A*)
- Digital System Design (Grade: A*)
- VHDL (Grade: A)
- Real-Time Digital Signal Processing(Grade: A)
- Entrepreneurship (Grade: B)
- Embedded Systems Design with Zigbee (Grade: A)
- C++ programming with ARM Mbed and touch switch PCB design (Grade: A)